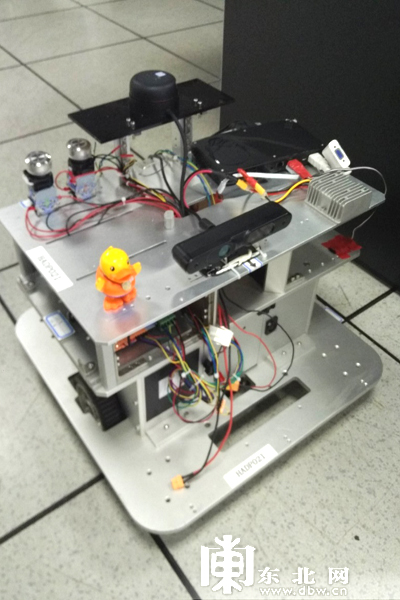
东北网5月9日讯(记者 王春颖) 视觉导航最早的概念是出现在自动化流水线领域,而并不是AGV(无人搬运车)导航领域。AGV视觉导航系统是以视觉传感器(一般为深度摄像头)采集图像数据为依据实现场景的建图,AGV的在场景中的定位,AGV运动轨迹规划和运动中避障的系统。也就是说,视觉导航系统就好比AGV的眼睛,能够引导AGV进行移动。
与其他的导航方式不同,视觉导航AGV存在的最大优势即是允许无固定参照物。传统的激光定位导航技术利用激光雷达作为主要传感器,虽然定位精度较高,但是成本十分昂贵,而且在无特征(2D)场景和重复场景的环境下受到很多的限制。视觉导航技术一方面可以改善激光传感器受场景限制的问题,另一方面成本相对激光导航技术节省了5倍以上。
我省哈工大机器人集团子公司中导机器人研发的AGV视觉导航系统正式实现了这一目标,为国内同行业填补了空白。据悉,该公司成立于2016年9月,是哈工大机器人集团(HRG)旗下专注于移动机器人技术研发的子公司,拥有包括机器人导航、视觉、底盘、多机调度等核心技术,致力于成为打造智慧工厂、自动化车间的领跑企业。与哈工大、上海交大、中科大等知名院校建立了长期产学研合作关系,已申请相关国家发明专利60余项,科研与创新实力雄厚。企业相关负责人告诉记者,目前国内运用较多的AGV定位导航技术,主要以激光和磁条两种方式,视觉导航的应用极其少见。此项技术在国内同行业内处于先进水平。
据了解,此项技术无需安装人工标识物(二维码、反光板),可以依靠自然场景种的物体进行定位导航。相对与传统的2D激光导航方式,解决了2D激光导航在无特征场景和重复场景应用受限问题,可利用图像生成的3D数据,可以实现AGV在三维的上的路径规划和避障。此外,由于收集的图像特征比较多,在AGV位置丢失的情况下通过特征匹配可以实现较高成功率的重定位。利用图像的高信息量,结合深度学习技术,可以实现更丰富的路径规划策略。
据介绍,用发展的眼光来看,视觉导航有着非常良好的前景,一方面是因为,视觉导航最接近与理解人类的“导航和避障”方式,多摄像头除导航外,还可以作为巡检、记录的功能,而且AGV最终会走向人工智能导航的方向(AIGV),无固定参照物的视觉导航方式,将能够获得更便利的部署。